LDWS - Curved Lane

Our Lane Departure system allows for accurate measurement of range and speed with a defined lane edge. It's ideal for testing vehicle Lane Departure Warning Systems (LDWS).
Combining the VB3iSL-RTK with the Video VBOX and vehicle CAN data provides a complete vehicle testing package. Lane Departure Warning testing consists of two stages:
- Lane Survey
During this stage curved line edges can be surveyed using the Lane Survey trolley (RLACS173-XXX*) to provide an accurate survey of the lane under test. *XXX denotes the type radio frequency – please refer to your distributor for further information.
- Measurement Tests
In this stage the surveyed line edges are loaded into the test VBOX to act as a measurement reference. Then the Lane Departure test can be conducted with the VBOX measuring all of the parameters listed below with respect to the surveyed lane edge.
Hardware Configuration
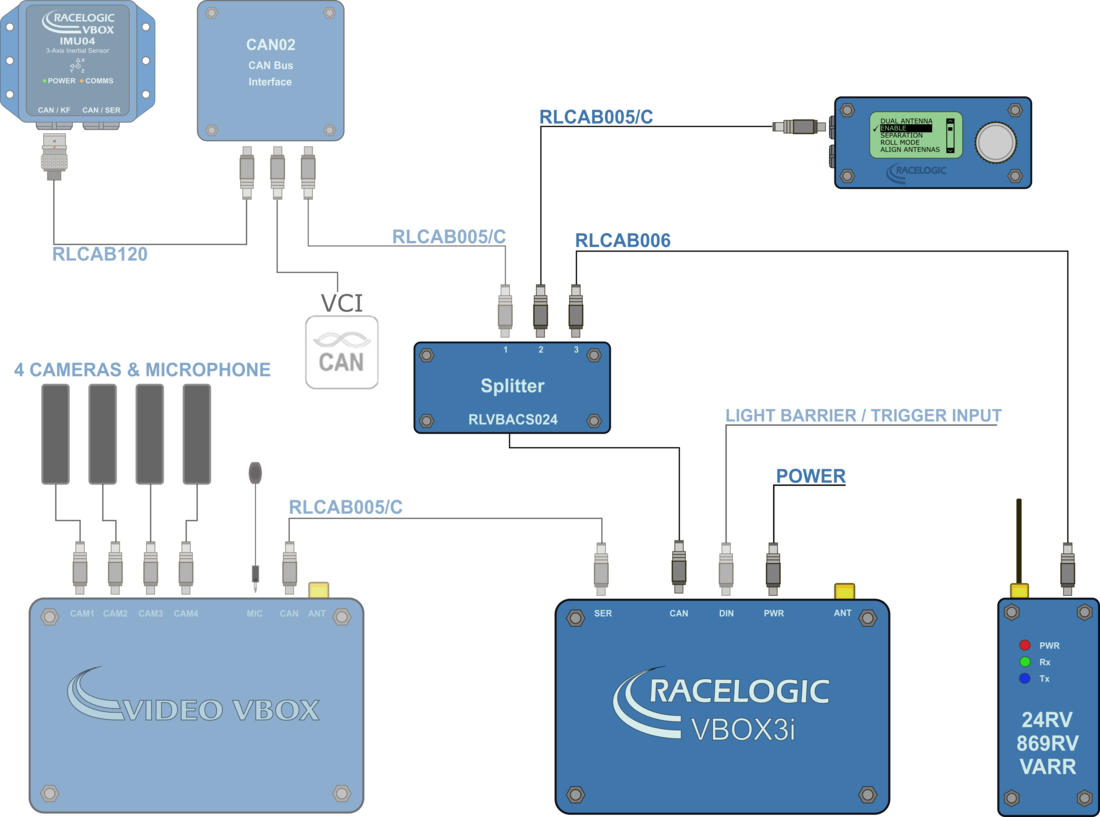
The following diagrams show the recommended hardware configuration for each vehicle. The items greyed out are not essential but many customers may find them beneficial.
Connection between the VB3i and computer should be made via USB or Bluetooth to ensure optimum performance.
Please ensure that all vehicle antennas are correctly positioned and connected.
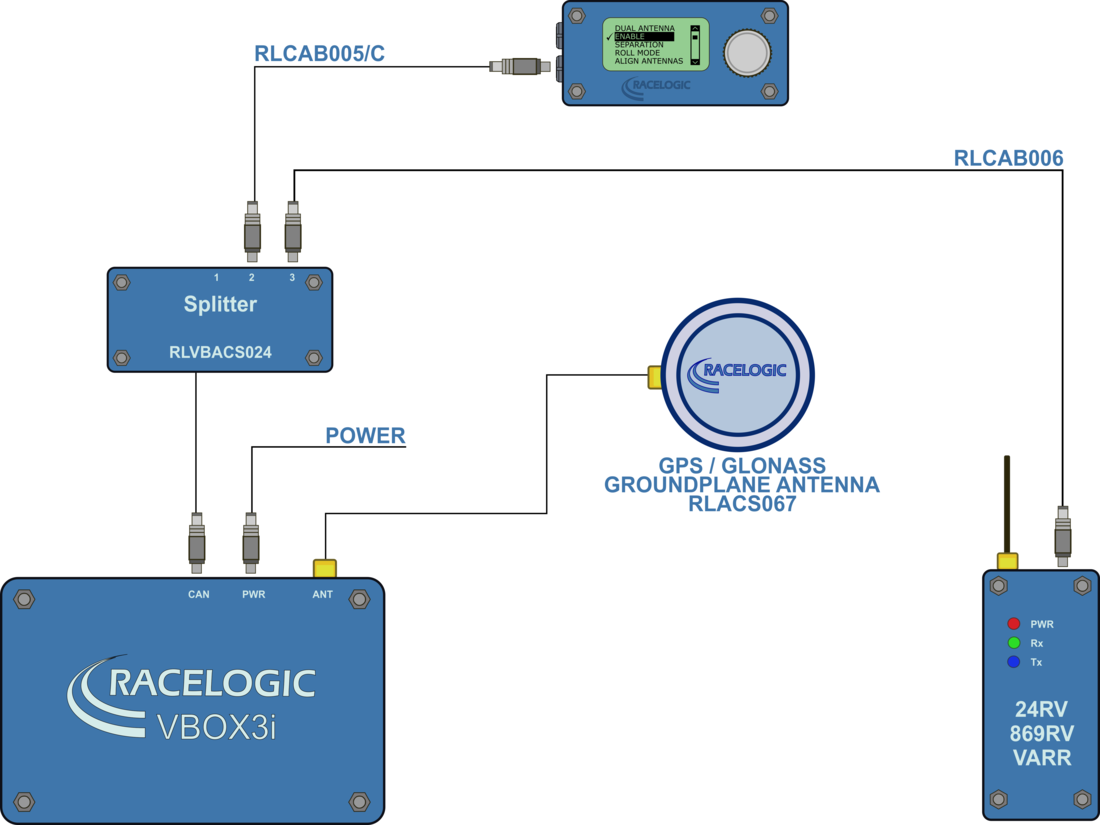
Lane Departure Test Schematic
VBOX Configuration
Base Station
A static Base Station must be used for the VBOX to gain the RTK 2 cm positional accuracy. This is required for the lane survey as well as during testing.
Moving Base cannot be used because a static Base Station is the only way to create a reference to a static location, which then allows measurement to other static objects like lane edges.
See the Base Station user guide for Base Station installation.
Important Note: The Base Station GPS antenna must be in exactly the same location for lane survey and for subsequent testing. It is also good practice to save the location into the Base Station memory.
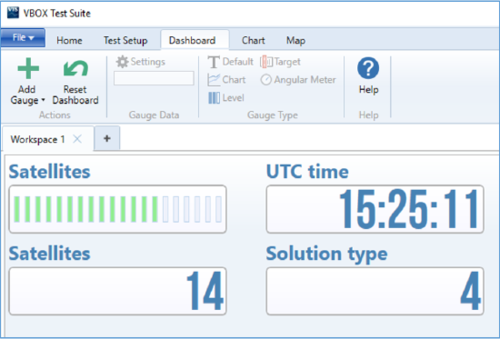
Confirm that the VBOX unit is in RTK 'Fixed' DGPS status, indicated by the following:
|
'DIFF' LED on the VBOX front panel is illuminated green. |
A VBOX Tools live window set to Solution Type shows 'RTK FIXED'. |
|
A VBOX Test Suite live Workspace window set to Solution type shows '4' (RTK fixed). |


Process SummaryUsing Racelogic ADAS systems, there are two setup methods dependent on the straightness of the test lane edge. The following schematic shows the options for determining Lane Departure Warning parameters.
|
.png?revision=1)
Hardware Configuration – Lane Survey1. Connect the VBOX equipment as shown in Lane Survey Configuration with the GPS antenna mounted on top of a survey pole (RLACS168). 2. Enter the setup menu of VBOX Manager. 3. Select the 'VBOX' option. |
4. Select 'LOG RATE' and set the rate to 100 Hz, then select 'BACK' to return to the 'VBOX' setup menu..png?revision=1) |
5. Select 'DYNAMICS' and set the dynamic mode to 'NORMAL', this Dynamics mode is best for ADAS tests, return to the 'VBOX' setup menu..png?revision=1) |
| 6. Select 'DGPS' and set the DGPS mode to the same 2 cm mode that the Base Station is set to, return to the 'VBOX' setup menu. For further info on RTK modes see RTK Configuration. .png?revision=1) |
7. Select 'DGPS RS232 Rate' and select the appropriate settings for your radios, return to the 'VBOX' setup menu.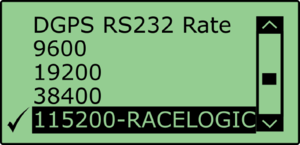 Note: To ensure that the VBOX receives the DGPS correction signal, the correct RS232 rate must be set. All Racelogic blue boxed radios use 115200 kbit/s, Satel grey boxed radios use either 19200 kbit/s or 38400 kbit/s. |
Lane SurveyIf the test lane is curved then this method can be used to obtain the reference lane data. This method requires the use of a Survey Trolley (RLACS173-XXX where XXX represents the frequency of the Base Station). When using the Survey Trolley data is recorded at 10 Hz and provides a more accurate representation of a lane on a curved road. Please see the Survey Trolley instruction manual for instructions on how to assemble the equipment. |
Multiple LanesIt is possible to load three surveyed lanes into the VBOX which can then be individually selected via VBOX Manager. It is NOT possible for the VBOX to make measurements to more than 1 lane edge at a time. For 2 cm positional accuracy during the Lane Departure Warning Test, an RTK Base Station is required. |
Curved Line1. Assemble the Survey Trolley and mount the VBOX, radio modem, ACS112L Li-Ion battery and VBOX Manager into the surveying back pack.Assembly instructions can be found here |
|
|
2. Select 'LANE DEP' and then select 'SURVEY MODE'. 3. Exit the 'ADAS' menu and return to the VBOX Manager home screen. This presents a new display designed for controlling the survey mode function. |
 |
|
4. When the VBOX displays 'RTK Fixed' you can start to survey the lane. 5. Place the centre line of the Survey Trolley over the lane edge to be surveyed and select ‘START’ on VBOX Manager to start the logging before moving. 6. When the lane surveying is completed stop the logging and revert the VBOX back to standard operating mode by de-selecting 'SURVEY MODE' enabled in step 2. 7. Remove the CF card from the VBOX and download the recorded reference lane .vbo file from the VBOX onto a PC. 8. Run VBOX File Processor software, and using the ‘Load Input File’ option select the recorded reference lane .vbo. |
.png?revision=1) |
| 9. Expand the 'ADAS' drop down menu and select the ‘Lane Data Generation’ process block, either by double clicking or dragging and dropping it in to the ‘Selected Process Blocks’ window. | |
| 10. Click on the ‘Process Output File’ at the bottom of the screen to create the required .VBC file.
Note: The software will automatically append ‘_Processed’ on to the end of the reference lane file name (i.e. VBOX0005_Processed.vbc). If you wish to change the filename to something more representative click on the three dot ‘…’ icon at the bottom of the screen. |
|
| 11. Copy the created .VBC file on to the root directory of the compact flash card being used in the VB3iSL-RTK unit. | |
| 12. Place the Compact Flash card back into the VB3iSL-RTK unit. | |
| 13. Enter the 'LANE DEP' option within 'ADAS' configuration on VBOX Manager. | |
|
14. Select the appropriate lane number and select 'SET LANE'. |
|
|
15. Select the 'LOAD' option. |
|
|
16. The VBOX will browse the CF card for .vbc files, select the appropriate .vbc file for the reference lane in question. The lane is now loaded into the VBOX and is ready to be used to generate live Lane Departure values. |
|
.png?revision=1)
.png?revision=1)
.png?revision=1)
.png?revision=1)
.png?revision=1)
Pre-Test ConfigurationCorner PositionIn accordance with the NHTSA “Lane Departure Warning System NCAP Confirmation Test December 2008, “Lane departure is said to occur when any part of the two dimensional polygon used to represent the test vehicle breaches the in board lane line edge. In the Case of tests performed in this procedure, the outside front corner of the polygon will cross the line edge first”. “The corners of the polygon are defined by the lateral and longitudinal locations where the plane of the outside edge of each tire makes contact with the road. This plane is defined by running a perpendicular line from the outer most edge of the tire to the ground.” The following provides a guide to setting the two front left and right measurement positions. |
Manual Corner PositionWhen using the down sampled survey lane as a reference lane it is not possible to use the auto corner position function within the VBOX Manager. In this instance it is necessary to manually enter the offsets into VBOX Manager. |
|
1. Within the 'LANE DEP' option of VBOX Manager select 'CORNER POS'. |
|
2. Select 'SET FL POS'. |
|
3. To manually set the corner position select 'LNG DIST'. |
|
4. Enter the 'LNG DIST' value in accordance with the following orientation:
|
| 5. Repeat step 4 but for the 'LAT DIST'. |
| 6. Repeat steps 2-5 for FR, RL and RR as required. |
.png?revision=1)
.png?revision=1)
.png?revision=1)
.png?revision=1)
Saving and Loading Corner PositionsOnce corner positions have been set in VBOX Manager, they can be saved as a .vbc file and recalled later for repeatability. If you have .vbc files saved using pre VBOX firmware version 1.2.5, you will need to load these back in, and re-save out to make them compatible with latest firmware. Note: For corner positions to be recalled accurately, the GPS antenna location on the car and the location of the Base Station GPS antenna must be identical as when the data was recorded. |
|
1. Within the 'CORNER POS' option of the 'ADAS' menu select 'SAVE'. |
| 2. Within the 'SAVE' menu select the appropriate file name. This will be saved onto the CF card as a .vbc file. |
| 3. To load a .vbc file containing offset data, select the 'LOAD' option from the 'CORNER POS' menu. This will present a list of saved .vbc files containing corner position offsets. Selecting the appropriate file loads these values into the VB3iSL-RTK firmware and allows for range values to be calculated to these corner positions. |
Heading SmoothingThere are two configurable variables linked to heading smoothing; ‘Smoothing Distance’ and ‘Speed Threshold’. Due to the nature of the vehicle separation measurement and calculation process many channels are derived using the heading of the vehicle which can be noisy. To overcome this heading can be smoothed with a dynamic smoothing routine. Under the 'LANE DEP' option within the 'ADAS' menu, select 'SMOOTHING'. |
Smoothing DistanceThe smoothing routine is calculated between the current and previous samples. The previous sample to be used is determined using a Smoothing Distance, this results in a variable number of samples used to determine the smoothing level on the heading; the lower the speed the more samples that are used. With 100 Hz logging and a smoothing distance of 1.1 m at 80 km/h, the heading is calculated over the previous 5 samples, whilst at 15 km/h the heading is calculated over the previous 26 samples. Select ‘SMOOTHING DIST’ and enter the smoothing option between 0.00 m and 2.00 m. A smoothing distance of 2.00 m is recommended. |
Speed ThresholdDue to the large number of samples in a small distance when travelling at low speed the heading channel can become very noisy, this in turn results in many of the Vehicle Separation channels becoming noisy at low speed. When the speed threshold is set to a certain speed the heading is locked when the vehicle travels under that speed. |
|
1. To set the speed threshold repeat steps above in 'Heading Smoothing', then select 'SPD THRESHOLD' and enter the speed threshold option. |
| 2. We recommend a Speed Threshold of 5 km/h. |
.png?revision=1)
.png?revision=1)
.png?revision=1)