How Does RTK (Real Time Kinetic) Work?

RTK Explained
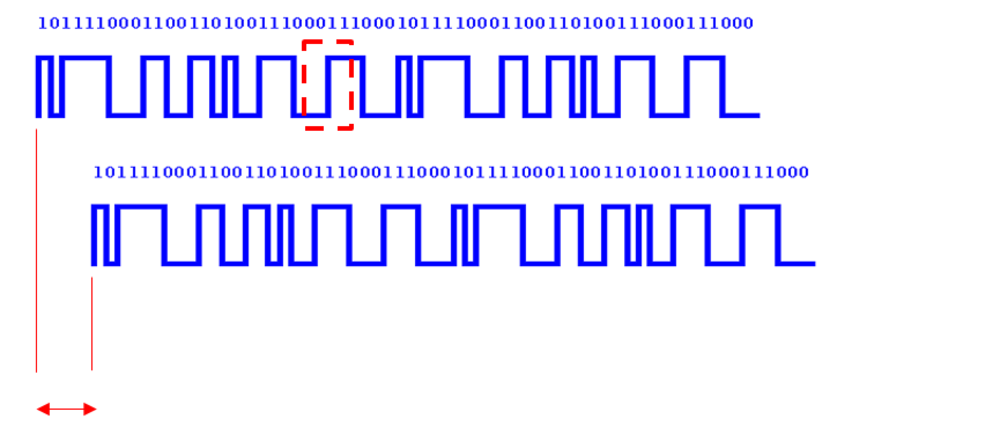
Standard GNSS looks for changes in the signal codes sent by each satellite. This is done by measuring the times of signal edges, and then calculating the time for the signal to arrive.
When comparing two signals, we are measuring a time delay of about ~0.07 s. This is the time delay from satellite to receiver, which is about 20,000 km.
.png?revision=1)
To obtain accuracy up to 1 cm, we need to measure the time delay between these signals down to 0.00000000003 (1/30th of a nanosecond). The picture below shows a single rise between 0 and 1 (highlighted in the image above).
.png?revision=1)
It is difficult to compare this with the reference to 1/30th of a nanosecond, as we do not know at which exact point along this rise, the change from 0 to 1 happened.
This means that the positional accuracy when using corrected GNSS signals (called code-phase signals) alone is around 0.5 m.
To obtain a higher level of accuracy, up to 1 cm, another technique needs to be used in conjunction.
.png?revision=1)
We use a GNSS ‘carrier wave’ signal, transmitted at a very high frequency (1575 MHz) to pinpoint the exact moment the signal rises from 0 to 1.
You can see from the image above that the phase of the carrier signal flips when the data signal changes.
.png?revision=1)
Because this signal is being transmitted at such a high frequency, it means that we can measure with far greater precision, exactly when the signal change occurred.
This provides a much higher timing resolution, so, when we are lining up our real time and corrected signals, we know with a much greater accuracy, when that signal changed. Therefore, we know to a much greater accuracy what the true distance is between the satellite and the receiver.
The difference this makes is shown on a 24 hour plot below. The un-aided GNSS is shown in red, while the RTK is shown in green at the centre.
.png?revision=1)
RTK versus un-aided GNSS
Network RTK
Using a static Base Station RTK Solution from Racelogic is a convenient and cost effective option to achieve higher positional accuracy. However, there are situations where setting up a base station is not possible, for example if the roving vehicle must travel tens of kilometres away from the base station. This can allow atmospheric errors to affect the positional accuracy of the roving vehicle. In these scenarios, another RTK Solution is possible called ‘Network RTK’, or more commonly ' NTRIP'. More information on this is available here.
For more information, See also: